News et tests de Quadricopt�res


Kilauha notre super modératrice tueuse de DAL (entre autres) nous présente son Kil-Six, un drone de classe 250 équipé en FPV…
Kil-Six
Suite à mon premier racer, et voyant les défauts que ce soit matériel que de mise en place sur mon châssis maison, j’en fais un complet du début à la fin.
Après recherche de ce que je voulais faire, j’ai ciblé un racer en 6 pouces, voulant faire quelque chose de différent que mon 5 pouces.
Première étape, déterminer les composants :
- Moteurs cobra 1960kv
- ESC 20A BLheli avec bec 5v
- Naze 32 acro
Après dessin du châssis, programmation, découpe en FAO d’un patron en acier, on obtient :

Prédécoupe du polycarbonate de 2mm (plus musclé à la cisaille qu’une plaque de 1mm, mes mains s’en souviennent encore), collage pour la plaque inférieure, découpe, perçage :

Je laisse les protections plastiques en place le temps du montage, en décollant juste autour des parties mises en place définitivement.
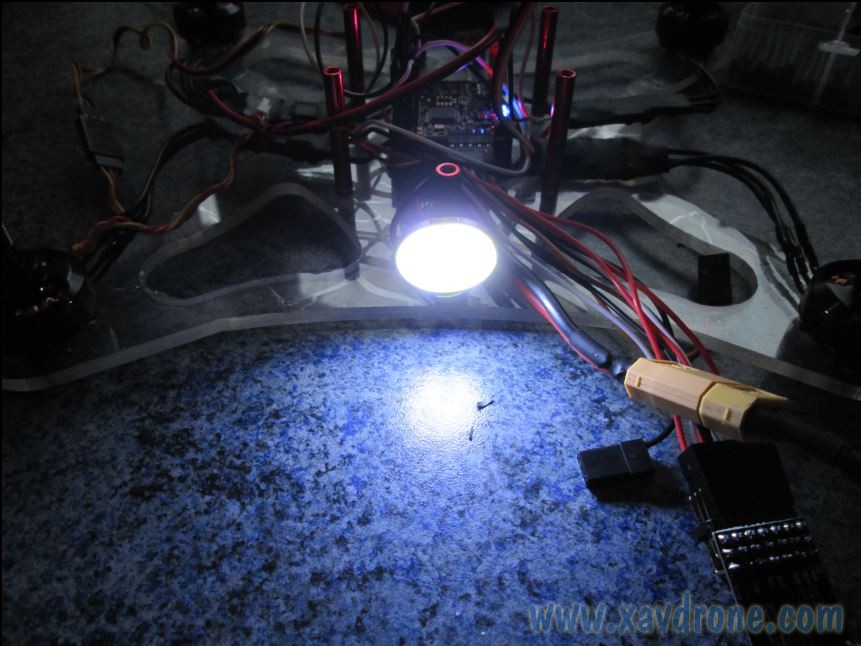
Première chose que j’ai fait, c’est de souder l’alimentation à la carte de puissance afin de vérifier toutes les tensions en sorties, puisque d’après les commentaires il pouvait y avoir des problèmes de tensions non juste… Puis j’ai soudé des câbles sur la sortie 12v pour ma led.

Fixation des moteurs. Attention à la longueur des vis, il ne faut pas que ça touche la bobine.

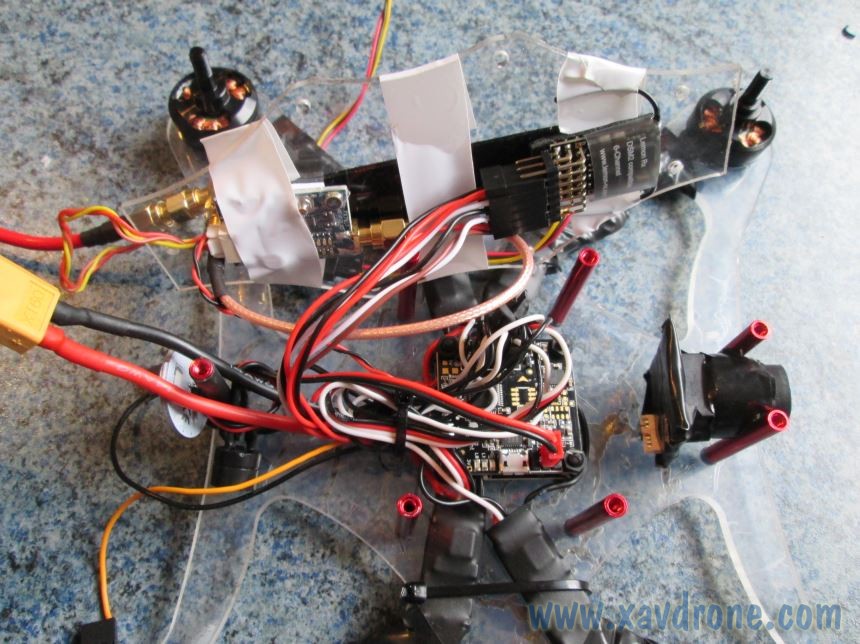
Placement des ESC, et soudures avec la carte de puissance, puis avec les moteurs, sans oublier de placer la gaine thermo pour pouvoir gainer les ESC après vérification du sens de rotation des moteurs.
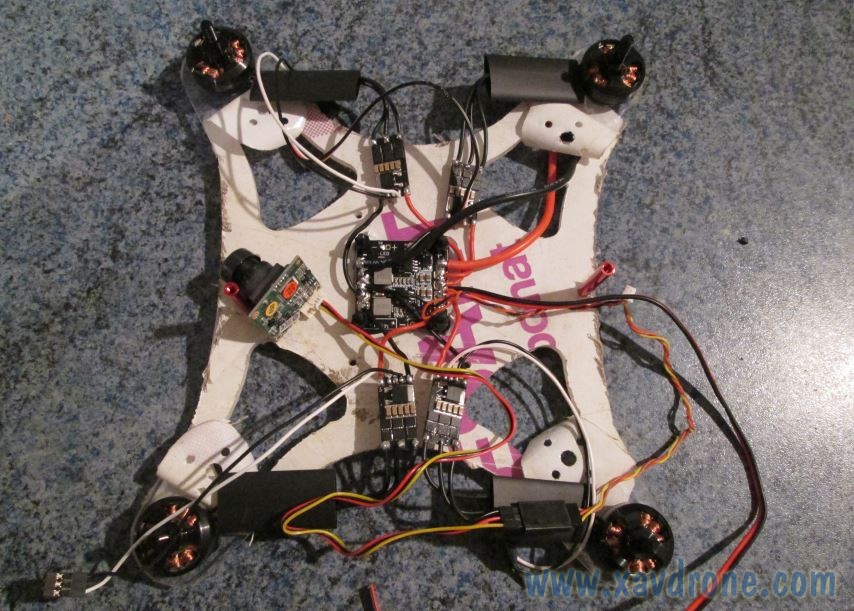
Soudure de la led à l’extrémité des câbles, puis placement de la naze 32 en superposition de la carte de vol, branchement des ESC sur la carte de vol et du récepteur Lemon (plus d’infos ici).

Après tout ça, bind du récepteur avec la RC, flash de la naze 32 sous betaflight, calibrage des ESC puis test de rotation des moteurs avec changement des fils moteurs si besoin. Lorsque tout est vérifié, on peut rétracter la gaine thermo et retirer la protection du le polycarbonate.

Puisque je vole uniquement en vol fpv, j’ai investie dans la RunCam PZ0420M 600TVL après l’avoir testé sur le racer de The Guitar Hero.



Et vu que je crash beaucoup dans de l’herbe mouillée, je la saucissonne dans du scotch isolant.

Ma méthode de fixation de la caméra utilise les 2 entretoises à l’avant du châssis que j’ai implanté à une distance suffisante permettant d’insérer l’objectif de la caméra entre elles, avec une largeur supplémentaire pour mettre une couche en plus autour.
J’utilise tout bêtement du tuyau de gaz : 2 rondelles ouvertes pour enrouler autour de l’objectif, puis scotchées fermement, et entaillée des 2 côtés en biais pour l’inclinaison de la caméra.
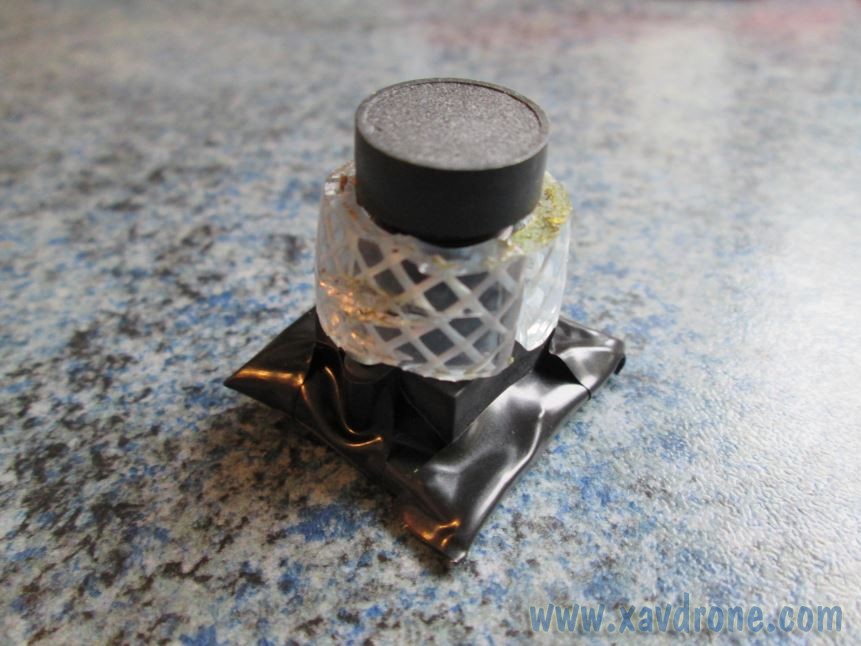




La caméra est ensuite insérée (en forçant) entre les entretoises et je peux l’incliner facilement en fonction de ma manière de voler.


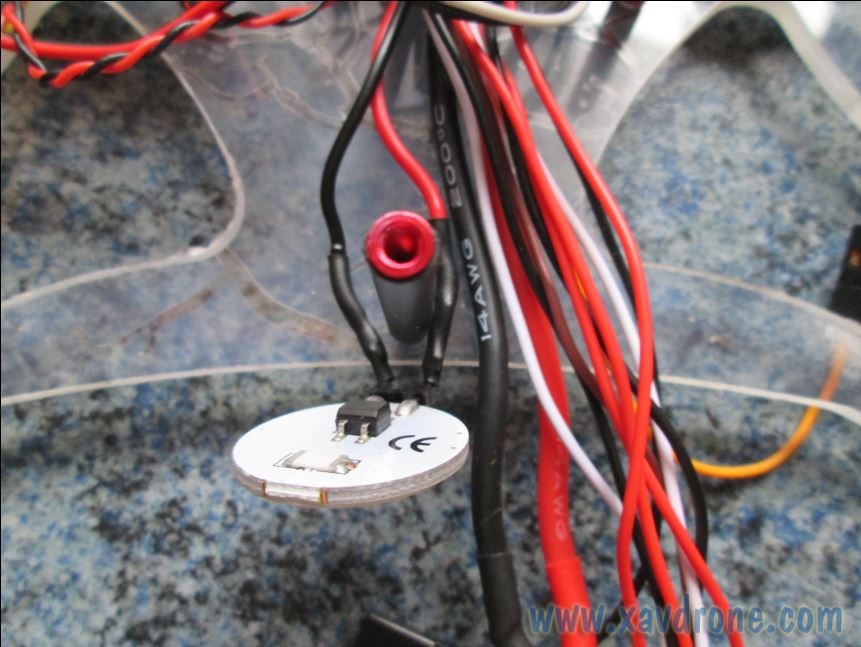
Pour finir je soude ma led afin d’aveugler, euh me signaler auprès des autres pilotes. C’est une led unique ronde de 4w. Un peu agressif pour un vol à vue. Je la positionne avec une fiche de chaque côté de l’entretoises précédemment isolé avec une gaine thermo, puis fixé avec un rilsan.

Fixation des ESC, puis des câbles moteurs pour ne rien avoir qui dépasse.


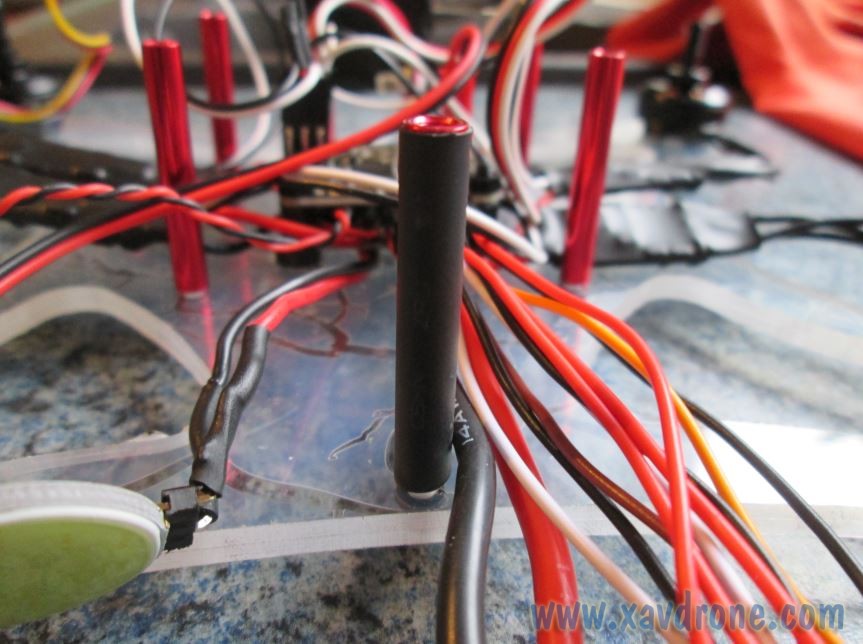
Pour avoir détruit 2 émetteurs vidéo, j’ai cherché à le mettre à l’abri sur ce racer. J’ai donc choisi de mettre une rallonge d’antenne qui traverse et est fixé à la plaque supérieure du châssis. J’ai mis un coude vu que mon objectif était qu’elle se mette à l’horizontale lorsque le racer finit sur le dos. Le coude dépasse ? oui, mais avec la lipo en place, ce n’est plus le cas, et pour avoir eu un crash aujourd’hui, ça a fonctionné. A voir sur la durée.

Fixation du récepteur Lemon, sans laisser dépasser les antennes qui risquent d’avoir une courte durée de vie… Fixation de l’émetteur derrière, et rilsan autour de tous les câbles pour ne pas avoir de mauvaise surprise en vol avant de tout refermer.
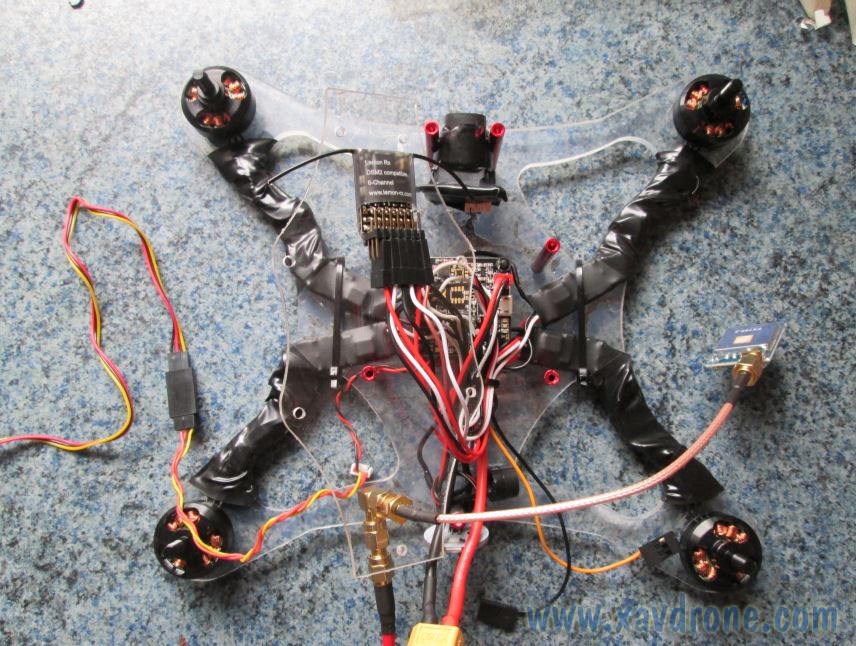


Le voila monté, plus qu’à finir la programmation et aller voler !
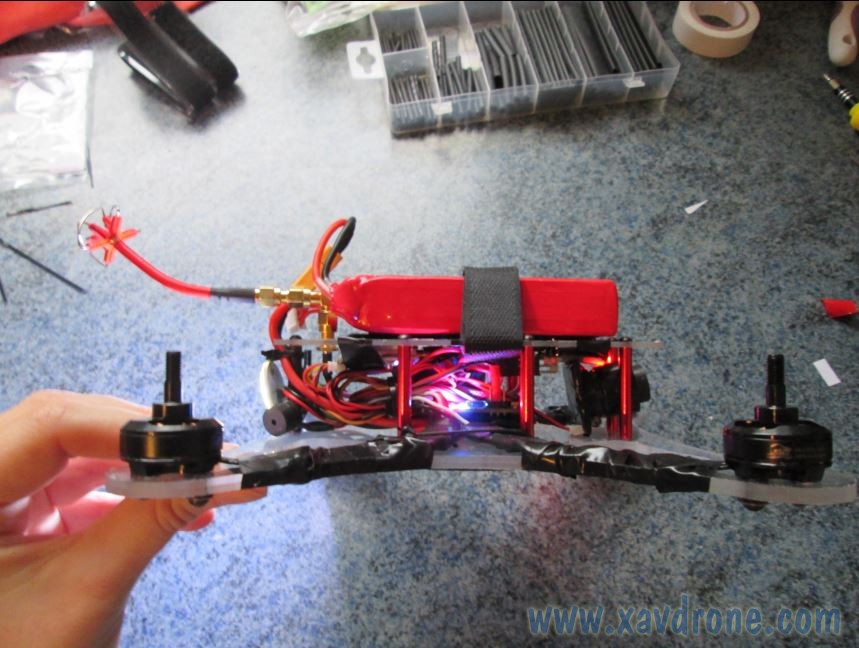


Et voici ce que ça donne


Par Kilauha, que vous pouvez retrouver sur le forum

Des articles réalisés par les membres du forum FAQ Drone, vous aussi proposez nous des articles et venez en parler sur notre forum !
Website: → FAQ Drone le forum
Connect

Une réponse à Kil-Six : FPV Racer
![]()
acheter un drone




Voitures RC

Livre

super taf Kilauha bravo! 😎